Formulation
Our goal is estimating the state $\mathbf{x}$ of a sensing platform equipped with GNSS and inertial sensors.
The state consists of the device's rotation, position, linear velocity, IMU gyroscope bias, and gravity direction at different time steps.
We define the general state $\mathbf{x}$ as
\begin{equation}
\mathbf{x} = \left[\mathbf{x}_1^\top,\mathbf{x}_2^\top, \cdots, \mathbf{x}_k^\top, \cdots ,\mathbf{x}_N^\top, {\mathbf{b}^g}^\top, {\hat{\mathbf{g}}}^\top\right]^\top~,
\end{equation}
where
\begin{equation}
\mathbf{x}_k = \left[\mathbf{R}_k^\top,
{\mathbf{p}}_k^\top,{\boldsymbol{\omega}}_k^\top,{\mathbf{v}}_k^\top\right]^\top~,
\end{equation}
We formulate a nonlinear optimization problem over the state variables $\mathbf{x}$, incorporating constraints from inertial preintegration and GNSS measurements. The objective is to find the optimal estimate $\hat{\mathbf{x}}$ that minimizes a joint cost function $J(\mathbf{x})$:
\begin{equation}
\label{eq:optimizacion_problem}
\hat{\mathbf{x}} = min_{\mathbf{x}} J(\mathbf{x})
\end{equation}
This cost function aggregates several residual terms, each encoding information from a different sensor modality or physical constraint. More details about this formulation are included in the article.
Observability Analysis
To analyze the system’s observability, we construct the observability matrix $\mathcal{O}$ by stacking the Jacobians of all residuals in the cost function with respect to the state vector, as follows
\begin{align}
\mathcal{O} =
\begin{bmatrix}
\frac{\partial \mathbf{r}_{\Delta \mathbf{R}}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\Delta \mathbf{v}}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\Delta \mathbf{p}}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\text{d}}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\text{p}_i}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\text{p}_j}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\omega}}{\partial \mathbf{x}}^\top,
\frac{\partial \mathbf{r}_{\mathbf{g}}}{\partial \mathbf{x}}^\top
\end{bmatrix}^\top
\end{align}
The explicit structure of the observability matrix \( \mathcal{O} \), derived from the defined residuals, reveals a maximum symbolic rank of 23 due to linear dependencies among GPS constraints.
To handle this underconstrained initialization, we fix the initial pose (position, velocity, and orientation), reducing the number of estimated variables to 14. In this setup, \( \mathcal{O} \) achieves a numerical rank of 11, with remaining ambiguities linked to the second pose, gyroscope bias, and gravity direction. Rather than relying on external priors, our method exploits the coupling between IMU preintegration and GNSS data, progressively enhancing observability as the trajectory evolves.
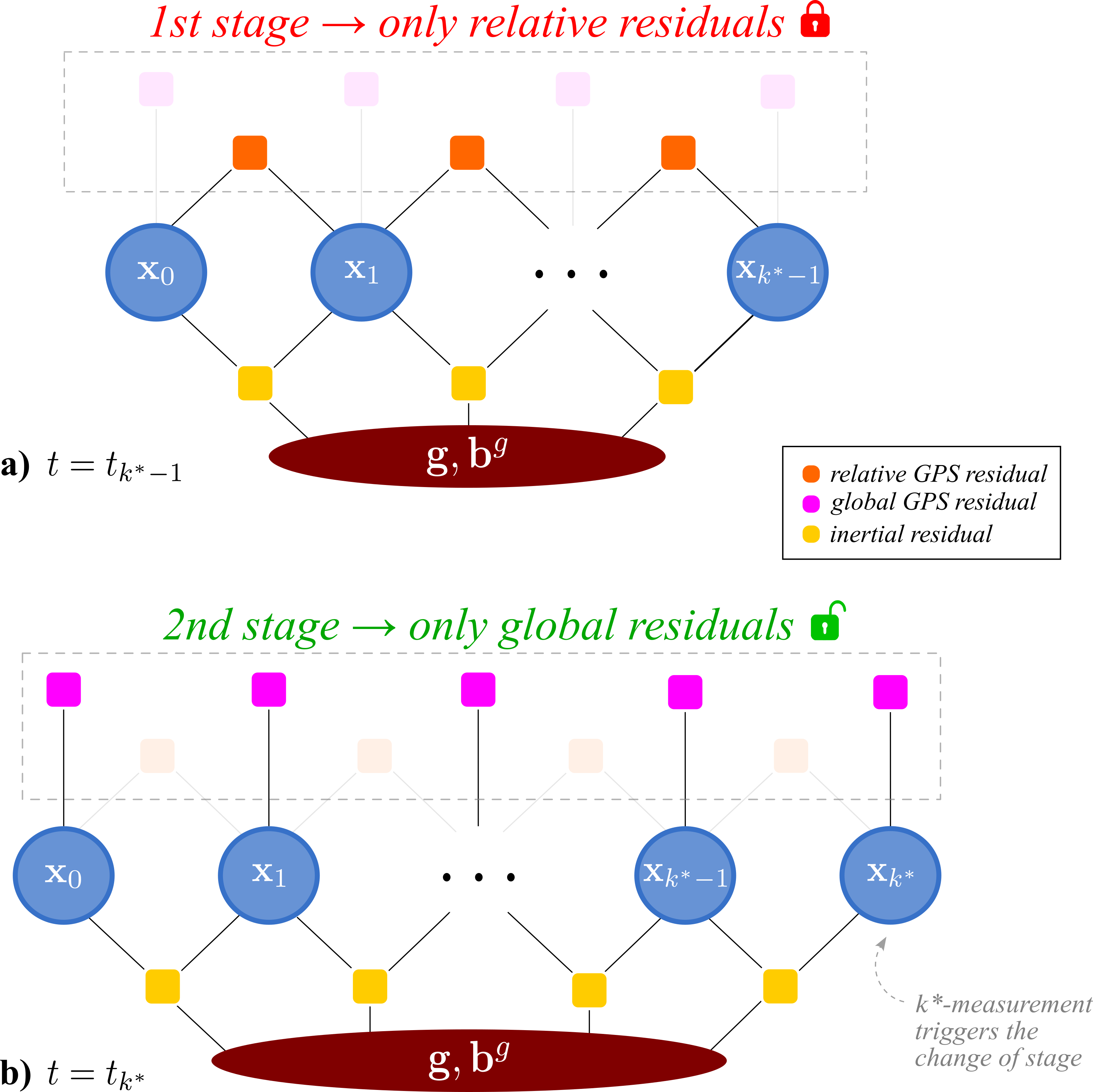
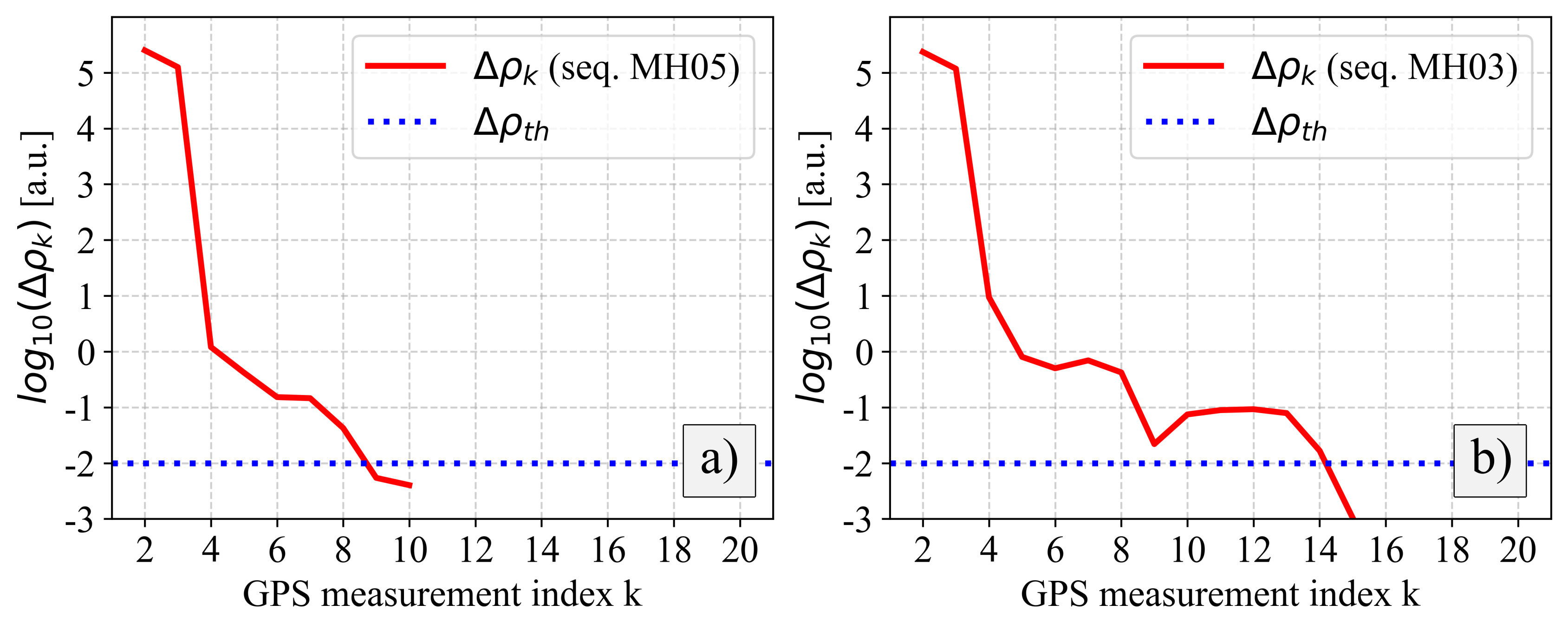
To ensure robustness, we delay the activation of global GPS terms until sufficient motion renders the system observable, thereby avoiding early noise sensitivity.