Abstract
Existing datasets fail to include the specific challenges of two fields: multi-modality and sequentiality in SLAM or generalization across viewpoints and illumination in neural rendering. To bridge this gap, we introduce SLAM&Render, a novel dataset designed to explore the intersection of both domains. It comprises 40 sequences with synchronized RGB, depth, IMU and kinematic-related data. These sequences capture five distinct setups featuring consumer and industrial goods under four different lighting conditions, with separate training and test trajectories per scene, as well as object rearrangements.
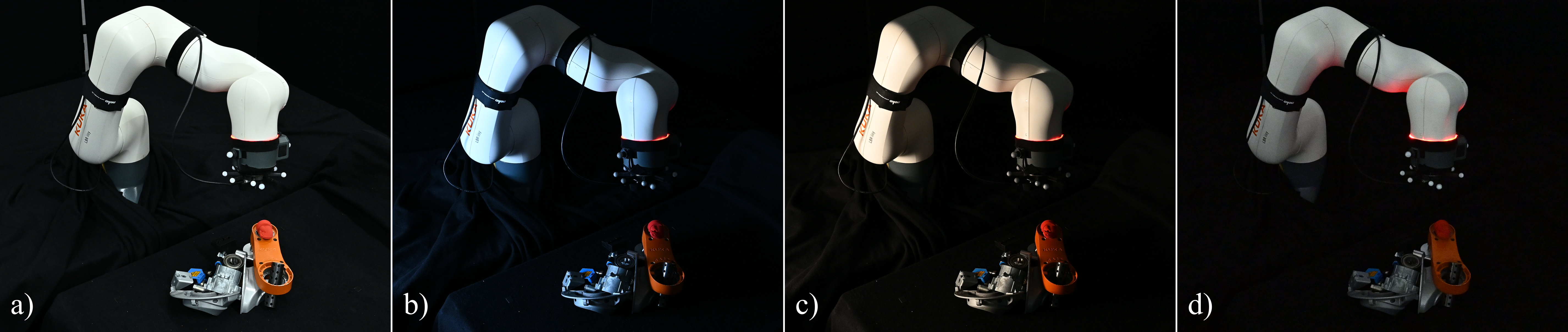
Illustration of our SLAM&Render dataset, captured from a camera in the end effector of a robotic arm, that moves around a set of objects on a table. See four different light conditions present in our dataset: (a)Natural (b)Cold (c)Warm (d)Dark.