Abstract
Models and methods originally developed for Novel View Synthesis and Scene Rendering, such as Neural Radiance Fields (NeRF) and Gaussian Splatting, are increasingly being adopted as representations in Simultaneous Localization and Mapping (SLAM). However, existing datasets lack the specific challenges of both fields, such as sequential operations and, in many settings, multi-modality in SLAM or generalization across viewpoints and illumination conditions in neural rendering. Additionally, the data are often collected using sensors which are handheld or mounted on drones or mobile robots, which complicates the accurate reproduction of sensor motions. To bridge these gaps, we introduce SLAM&Render, a fully controlled benchmark designed to isolate and evaluate specific challenges arising at the intersection of SLAM, Neural Rendering, and Gaussian Splatting. Recorded with a robot manipulator, it uniquely includes 40 sequences with time-synchronized RGB-D images, IMU readings, robot kinematic and ground-truth data. By releasing robot kinematic data, the dataset also enables the assessment of recent integrations of SLAM methods within robotic applications. The dataset features five setups with consumer and industrial objects under four controlled lighting conditions, each with separate training and test trajectories. All sequences are static with different levels of object rearrangements and occlusions. Our experimental results, obtained with several baselines from the literature, validate SLAM&Render as a relevant benchmark for this emerging research area.
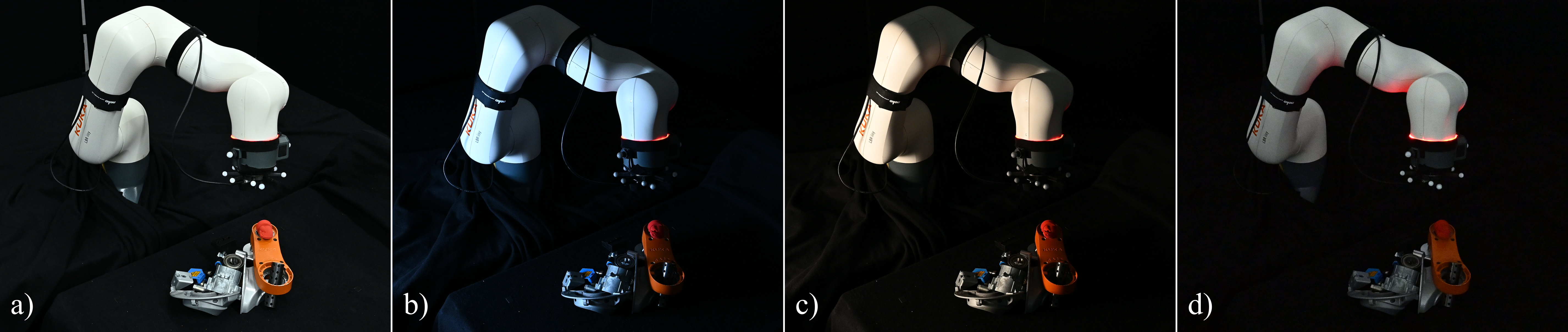
Illustration of our SLAM&Render dataset, captured from a camera in the end effector of a robotic arm, that moves around a set of objects on a table. See four different light conditions present in our dataset: (a)Natural (b)Cold (c)Warm (d)Dark.